Tensors of order 3
I'm wondering what a tensor of order 3 looks like, and what it's purposes are. I've seen them written down before, but they look like matrices; I'm probably not understanding the concept well. How is it different from a matrix?
[Revised question, based on the comments below.]
$\endgroup$ 52 Answers
$\begingroup$Let's make this clear:
To rotate any object in a linear room of $n$ dimentions, you need a matrix(=a second-order tensor) with $n$ rows and $n$ columns. Such a rotation matrix $A$ is a special case of a base transformation, you recognize it by it's determinant: $det(A)=+1$ (I'm not so super sure here.)
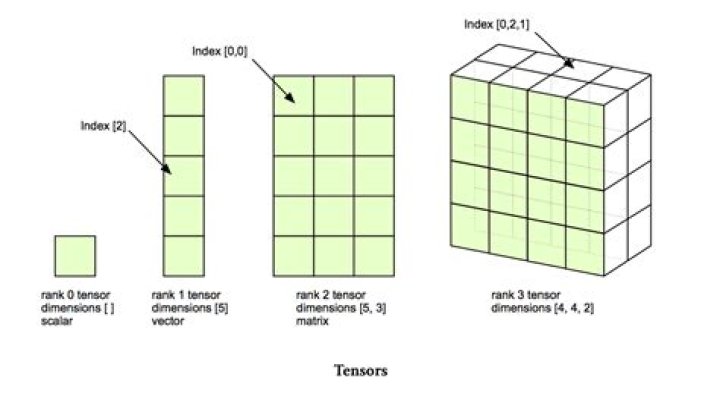
You don't use third-order tensors to rotate anything. So what's a $n$th- order tensor? There is some more abstract defintion, but for now, just imagine it as a matrix with $n$, instead of 2, indices: $T=a_{a b c d ...}$ So a third-order tensor has three indices. You can imagine it like a many matrix that is not a rectangle on the paper, but a cuboid in the room.
The matrix is a special case of a second-order ("two-dimensional") tensor. The common interpretation of tensors is as multilinear functionals. When you apply a matrix on two vectors (collapsing multiplication), you get a scalar. This function is linear in both vectors: $c= \sum \limits_{ij} a_{ij} b_i d_j$.
You can do the same with a third-order (or "three-dimensional") tensor:$c= \sum \limits_{ijk} a_{ij} b_i d_j e_k$. This is now linear in all three vectors. Or you do such: $c_{ij}= \sum \limits_{k} a_{ijk} e_k$, thus getting a second-order tensor, which we usually call a matrix.
The order of a tensor doesn't refer to the amount of entrys.
$\endgroup$ 2 $\begingroup$In my opinion, the best way to understand a rotation matrix is the Rodrigues's formula (as J.M. mentioned), or called axis-angle representation. Given a rotation axis and a rotation angle, then you can write out the rotation matrix.
For a 2D rotation matrix, it can still be interpreted by a axis-angle representation. But the rotation axis of a 2D rotation matrix is always the z-axis!!! As a comparison, the rotation axis of a 3D matrix can be arbitrary vector. You can get details from wiki.
$\endgroup$ 2